Вимірювальні системи космодромів
Визначення випробувальних траєкторій ракет-носіїв та історичних стратегічних випробувальних апаратів виконувалося за допомогою наземного командно-вимірювального комплексу (КВК) космодрому. КВК складається з вимірювальних пунктів (ВП), розташованих по всій території колишнього СРСР.

калібрувальна щогла системи «Вега», Мирний
Командно-вимірювальні комплекси космодромів
Для проведення траєкторних вимірювань ВП оснащувалися різними вимірювальними системами (ВС). На одному ВП розміщувалася одна або кілька ВС.

Командно-вимірювальні комплекси космодромів
Класифікація вимірювальних систем і засобів
Для траєкторних вимірювань на ВП використовувалися різні вимірювальні системи (ВС). На одному ВП розміщувалася одна або кілька ВС.
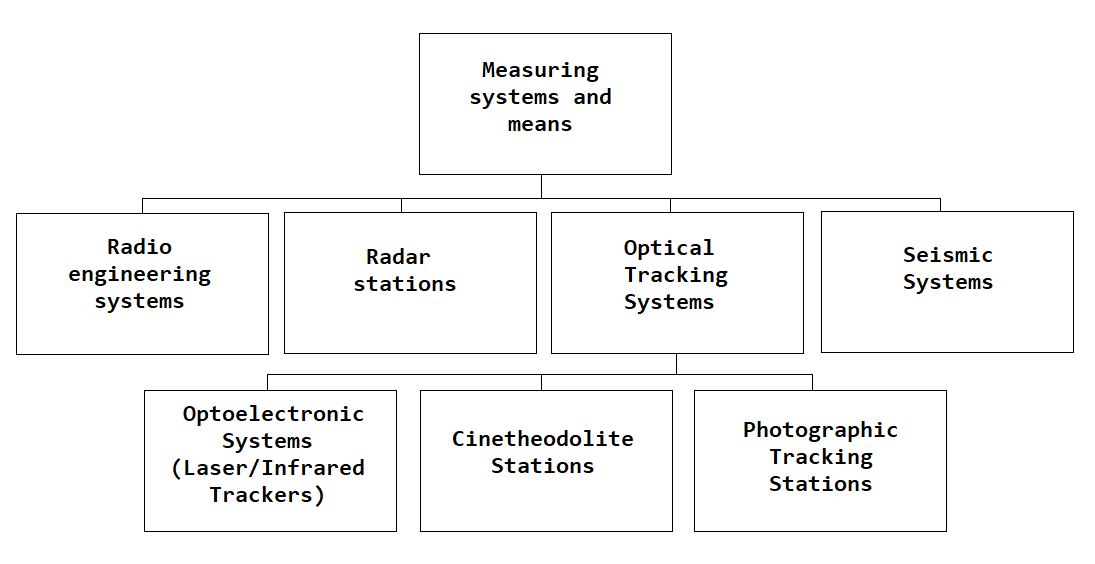
Класифікація вимірювальних систем і засобів
Ці вимірювальні системи поділялися на типи відповідно до фізичних ознак і принципу вимірювань. Інформаційні комплекси для попередньої обробки сигналів, керування антенами та управління під час льотних випробувань оснащувалися одним або кількома комп’ютерами. Наприклад, такі вимірювальні системи, як «Вега-НО (КО)» і «Катафот», мали власні локальні обчислювальні мережі. Вимірювальні системи мали зовнішній інтерфейс для виведення інформації в телефонну або телеграфну лінію зв’язку. Видавання інформації в лінію зв’язку здійснювалося з використанням різних протоколів, кадрів вимірювальної, службової, сигнальної та іншої інформації, у різних кодуваннях, оскільки єдиного стандарту для вимірювальних засобів не існувало.
Радіотехнічна система «Вега»: найточніша
Найточнішою вимірювальною системою виявилася радіотехнічна система «Вега». «Вега» працює за доплерівським принципом, вимірюючи різницю фаз радіосигналу, переданого з бортового приймача-передавача й прийнятого кількома наземними антенами, рознесеними на значну відстань. Аналізуючи ці фазові зсуви, система могла точно визначати положення випробувального апарата. Пеленгаційна підсистема підтримувала визначення траєкторії в реальному часі та вимірювально-керуючу координацію під час льотних випробувань.
Герман Барановський — головний конструктор системи «Вега»

Герман Олексійович Барановський, головний конструктор системи «Вега», був українцем і уродженцем Поділля, одним із провідних фахівців у галузі радіотехнічних вимірювань. Він стояв поряд із великими — Корольовим, Янгелем, Челомеєм і Глушком. Під його керівництвом була створена унікальна система траєкторних вимірювань, що забезпечувала надточні траєкторні вимірювання в реальному часі та координацію з центром управління під час льотних випробувань стратегічних ракет-носіїв.
Українець Андрій Ніколаєв, начальник сектору розробки програмного забезпечення в науково-дослідному інституті, відіграв вирішальну роль в інтеграції системи, працюючи під керівництвом Барановського. Він відповідав за розробку та впровадження програмних рішень, які з’єднували вимірювальні системи в єдиний наземний вимірювальний комплекс, забезпечуючи узгоджену роботу всіх компонентів системи «Вега».
Внесок цих українських фахівців у розвиток радянської радіотехнічної та космічної галузі є неоціненним — їхні інновації заклали основу для подальшого розвитку ракетно-космічних систем навігації та управління.
Якщо українець Сергій Корольов відправляв ракети в космос, то українець Герман Барановський відстежував кожен їхній рух, вимірював траєкторії, аналізував відхилення й доводив точність до досконалості. Його робота залишалася в тіні, але без неї не було б упевненості в успіху кожного запуску. Він створив систему, що стала радіотехнічним мікроскопом для траєкторій, виявляючи найменші відхилення в русі ракети, вимірюючи координати з граничною точністю й даючи інженерам змогу бачити невидиме. Це його спадщина в науці й техніці.
Головний конструктор системи «Вега»: Герман Олексійович Барановський
Основні характеристики вимірювальної системи «Вега-НО (КО)»
Система «Вега» є однією з найскладніших і найдосконаліших систем траєкторних вимірювань, розроблених у XX столітті. Її створення потребувало значних ресурсів і технологічних рішень, які були успішно реалізовані в Радянському Союзі.
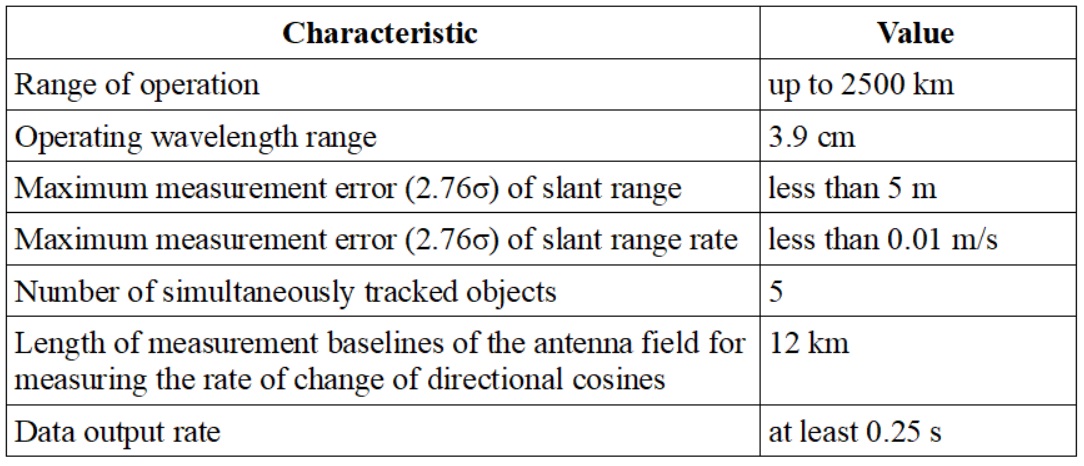
Основні характеристики вимірювальної системи «Вега-НО (КО)» [2]
Системи «Вега» в Росії
Нижче наведено кілька фотографій цієї системи, які дають загальне уявлення про масштаб задуму, втіленого в реальність колективом Харківського науково-дослідного інституту радіотехнічних вимірювань.

Головний конструктор системи «Вега»: Герман Олексійович Барановський

Центральна калібрувальна щогла системи «Вега», Норильськ

Центральна будівля (технічна позиція) системи «Вега» (Норильськ) із висоти пташиного польоту, а вдалині — Малий хрест системи «Вега» (Норильськ)

калібрувальна щогла й малий хрест системи «Вега», Норильськ

Технічна позиція системи «Вега» взимку (Норильськ)


Система «Вега», Норильськ. Сходи через кабельний коридор наведені для розуміння масштабу споруди. Сходи через кабельний коридор влітку та взимку

Норильська «Вега» на Google Map. Малий хрест і технічна позиція. Віддалені пости не потрапили через великий масштаб карти [3]
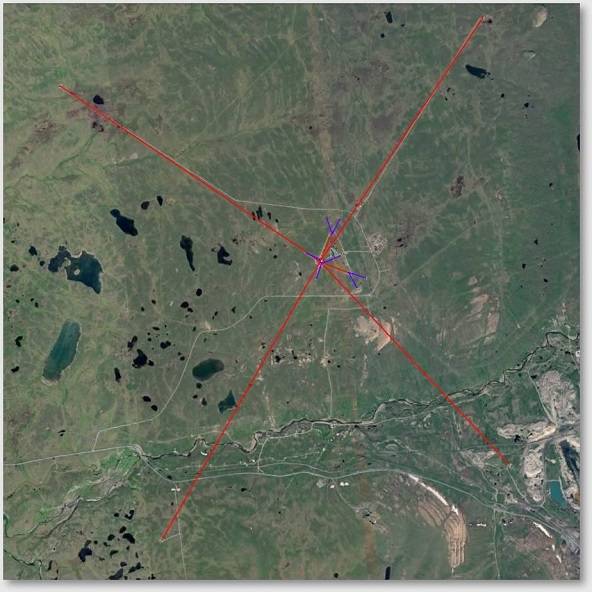
Загальний вигляд топології системи «Вега» можна побачити повністю лише з космосу. Місто Норильськ. Малий хрест і технічна позиція приховані за бузковими лініями [4]

Система «Вега» у Воркуті влітку
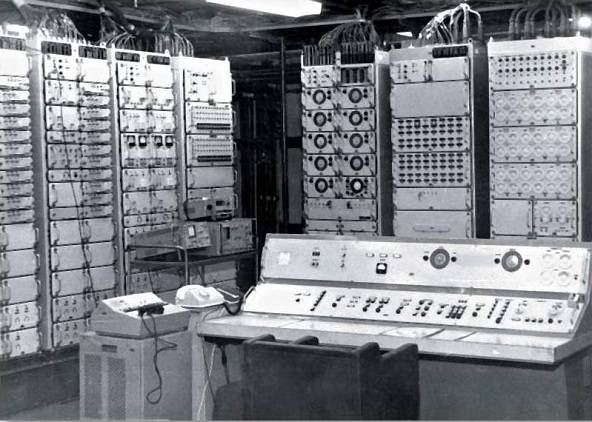
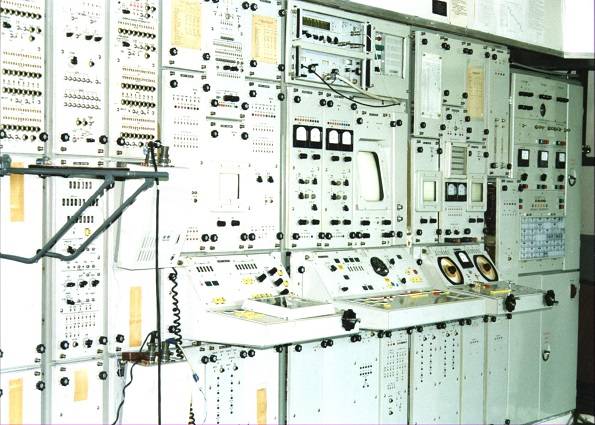
Апаратна зала системи «Вега»

Радіопеленгатор системи «Вега»

Комп’ютер ЄС-1045 (радянський аналог IBM System/360) — обчислювальна машина системи «Вега»

Накопичувачі на магнітній стрічці системи «Вега»
Після модернізації систему «Вега» було оснащено IBM-сумісними комп’ютерами під керуванням операційної системи QNX, що розширило її обчислювальні можливості.
Системи «Вега» СРСР (потім Росії): Південний (червоний) і Північний (зелений) маршрути відстеження, полігон Капустин Яр (жовтий)
Радіолокаційна система «Кама»
Значну роль у траєкторних вимірюваннях відігравала радіолокаційна станція (РЛС) «Кама». Система «Кама» випускалася в різних версіях, найпоширенішими були «Кама-А» і «Кама-Н» [5]. РЛС «Кама» використовується як у складі вимірювальних комплексів, так і в автономному режимі. «Кама-А» і «Кама-Н» відрізняються строками введення в експлуатацію. «Кама-А» використовує телеграфну лінію зв’язку, тоді як «Кама-Н» використовує телефонну лінію. Робота виконується бортовим відповідачем. Якщо бортовий відповідач «Веги» займає об’єм 2 літри, то в «Ками» він значно менший. Однак точність РЛС «Кама» нижча. Як правило, РЛС «Кама» працює з космічними ракетами-носіями, а «Вега» — зі стратегічними ракетами.

Антена РЛС «Кама-А»
Радіоапаратура РЛС «Кама-Н»
Оптичні вимірювальні системи
Оптичні вимірювальні системи — це кінотеодоліти й кінотелескопи, балістичні камери тощо, які широко використовуються під час проведення зовнішніх траєкторних вимірювань. Оптичні системи почали використовуватися для цієї мети значно раніше, ніж радіотехнічні системи. Високоточна оптико-електронна теодолітна система (ОЕС) «Віола» (1977–1988) призначена для вимірювання просторових координат ракет під час різних льотних експериментів. ОЕС «Віола» містить від трьох до шести теодолітних станцій, об’єднаних в єдину командну станцію вимірювального комплексу. Основним вимірювальним каналом теодолітної станції є кіноканал із частотою зйомки 1; 5; 10; 25 Гц. Дальність дії лазерного далекоміра — 25 000 м; похибка вимірювання ОЕС «Віола» становить: за кутовими вимірюваннями — 5 кут. с, за дальністю — 1 м.

Оптико-електронна теодолітна система «Віола»
Існують й інші ОЕС, наприклад:
- Рухомий інфрачервоний теодоліт «Велор-М» супровідного типу належить до приладів ближньої дії та дає змогу автоматично відстежувати й вимірювати кутові координати світних об’єктів на малій відстані.
- Інфрачервоний теодоліт «Велор-ІТ» призначений для визначення параметрів руху ракет шляхом вимірювання кутових координат об’єкта за його тепловим випромінюванням, а також для спостереження за об’єктом через телевізійну систему.
- Кінотеодоліт «Вісмутин» призначений для вимірювання кутових координат ракет. Кінотеодоліт оснащений кінокамерою, інфрачервоним координатором, автоматичною та напівавтоматичною системами наведення, автоматичним фокусуванням і автоматичним керуванням експозицією.
Інтенсивність випробувань
Інтенсивність випробувань системи «Вега»
У період з 1986 по 1991 рік система «Вега» активно використовувалася для високоточних вимірювань під час випробувань нових ракетних комплексів. Інтенсивність цих випробувань була настільки високою, що пуски ракет проводилися майже щотижня.
Випробування відбувалися в складних умовах, потребували високоточного контролю та безперебійної роботи вимірювальних комплексів. У деяких випадках за один день виконувалося кілька випробувальних пусків, тоді як більшість вимірювальних сеансів проводилася вночі, коли умови для радіотехнічних спостережень були найсприятливішими.
Одним із ключових викликів того часу була доставка магнітних стрічок і перфострічок із вимірювальними даними від систем відстеження. Ці носії даних часто транспортувалися літаками Міністерства оборони із затримкою від 2 до 3 днів, що не давало змоги враховувати результати попередніх випробувань під час підготовки до наступного пуску. За такої високої інтенсивності випробувань це створювало серйозне обмеження, яке вимагало автоматизації збору даних і обробки траєкторій.
Система «СБОР» і її інформаційний концентратор: інженерна основа зв’язку під час ракетних випробувань
Висока інтенсивність випробувань стратегічних ракет-носіїв і балістичних ракет вимагала створення інформаційної системи, яка забезпечувала б збір траєкторних даних, підвищення ефективності підготовки випробувань і керування різнорідними вимірювальними системами, розгорнутими по всій території СРСР. Такі інформаційні системи розроблялися в Харківському науково-дослідному інституті радіотехнічних вимірювань (НДІРВ).
Ключові висновки Германа Барановського про його кар’єру, систему, у якій він працював, і ціну, яку інженери платили за науковий прогрес, як описано в його книзі «Перейдена нива»
- Бюрократія та політичний тиск заважали роботі інженерів. Розробки виконувалися в умовах суворої секретності, що ускладнювало обмін інформацією та координацію зусиль між фахівцями. Інженери часто не могли навіть обговорювати свої проєкти з колегами, що призводило до дублювання роботи, помилок і неефективності.
- Страх перед керівництвом і політичними репресіями був щоденною реальністю. Будь-яка помилка могла мати серйозні наслідки — від втрати посади до переслідування. Багато талановитих інженерів були змушені працювати під постійним тиском, що негативно впливало на наукові прориви.
- Контроль з боку КДБ та ідеологічних структур гальмував науковий прогрес. Випробування й розробка нових технологій завжди перебували під наглядом «особливих спостерігачів», які контролювали процес, але не мали технічної експертизи. Втручання політичних структур часто затримувало ухвалення рішень і заважало науковому поступу.
- Надмірна бюрократія та нестача гнучкості сповільнювали інновації. Через складну систему погоджень інженери не могли швидко вносити корективи, а процес затвердження змін міг тривати місяцями або навіть роками.
- Радянська система давала унікальні можливості, але знищувала індивідуальну ініціативу. Держава виділяла величезні ресурси на науку, але натомість вимагала абсолютної покори. Особисті ідеї та ініціативи інженерів часто придушувалися в системі, де успіх вимірювався не проривами, а виконанням державних планів.
- Більшість розробників залишалася невизнаною. Їхні ідеї та винаходи ставали основою майбутніх досягнень, однак авторство часто залишалося анонімним. Багато хто так і не отримав визнання в історії, попри неоціненний внесок у науковий прогрес.
- Попри всі труднощі, покоління радянських інженерів зробило неможливе можливим. Працюючи під суворим контролем і тиском, вони розробили технології, які забезпечили успіх космічної та ракетної програми. Їхні зусилля, хоч часто й невидимі, стали основою світових наукових досягнень.