Координатно-часова навігаційна система забезпечення України
Цей навчальний курс лекцій базується на загальновідомих інженерних принципах, історичному контексті та власному професійному досвіді автора. Деякі елементи переосмислені у формі лекційної розповіді для освітньої наочності.
Курс лекцій: Координатно-часова навігаційна система забезпечення України (CTNS/СКНОУ)
День 1: Навігація та точність
Лектор: Андрій Ніколаєв, кандидат технічних наук, старший науковий співробітник, лабораторія навігаційних систем
Дата: березень 2003 р.
Вступ до теми
Студенти авіаційного університету відвідали свою першу лекцію в лабораторії навігаційних систем, де їх ознайомили з практичними аспектами високоточної навігації та реальними інженерними викликами.

Андрій – старший науковий співробітник
Перед студентами стояв чоловік середнього віку, чия поза та зосереджений погляд одразу видавали досвід у точному машинобудуванні та передових технологіях. Його охайно застебнута сорочка та виважені рухи відображали дисципліновану й методичну особистість.
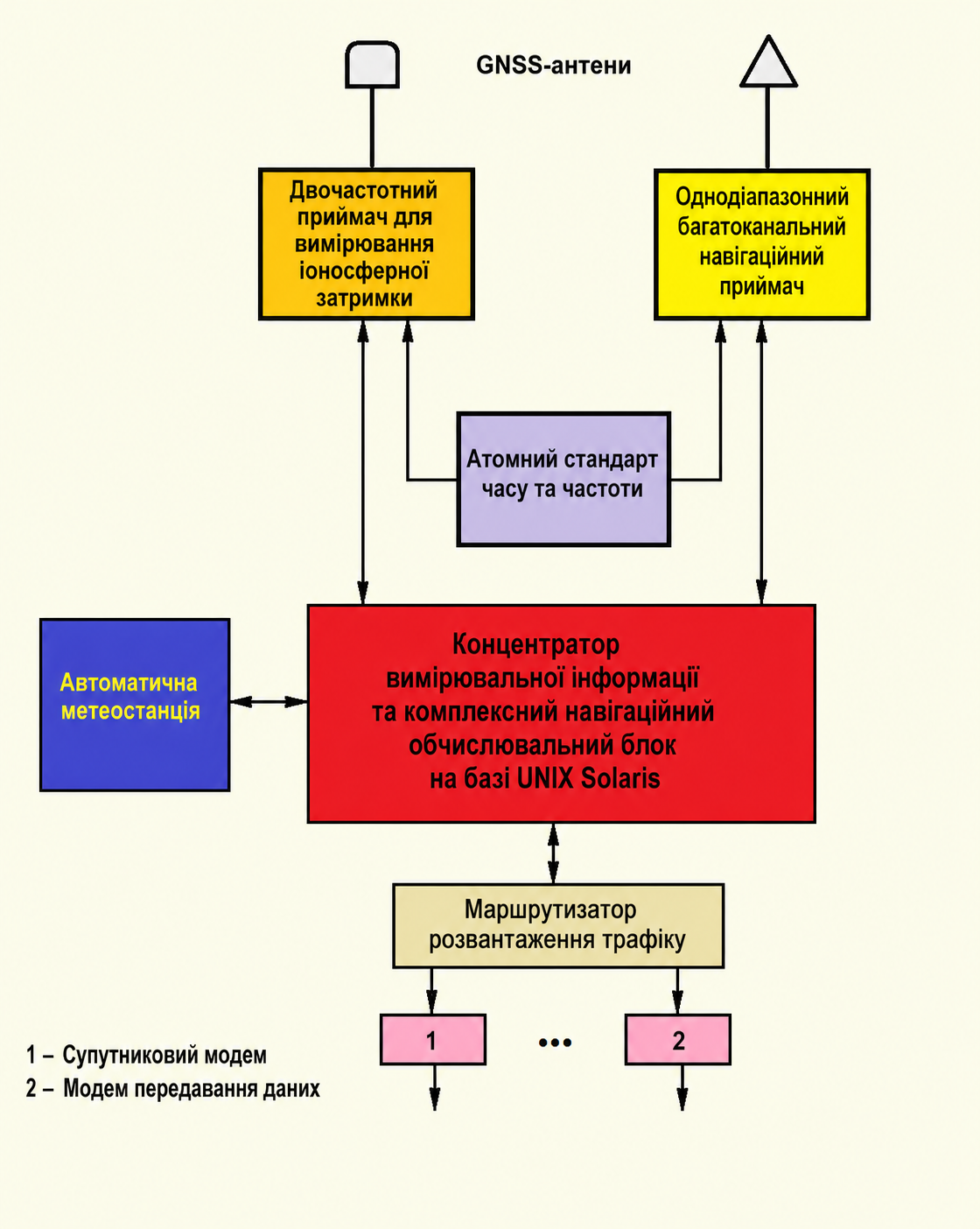
Поруч із ним стояв високий корпус станції контролю та корекції (СКК) — серця навігаційної системи, що об’єднувало найсучасніші інженерні рішення. Під металевим корпусом розміщувалися приймачі супутникових сигналів, атомний стандарт часу та частоти, обчислювальний модуль на базі UNIX, маршрутизатор та кілька модемів передачі даних. Кожен компонент мав одну мету — забезпечити максимально можливу точність і надійність навігаційних обчислень.
У тьмяно освітленій лабораторії індикатори обладнання ритмічно блимали, обробляючи безперервний потік вхідних сигналів. Здавалося, що сама станція жива — працює, аналізує та адаптується в реальному часі. Це був не просто набір пристроїв; це був узгоджений інтелектуальний вузол, де кожен процес, кожне обчислення й кожен алгоритм працювали в гармонії, забезпечуючи стабільні еталони часу та позиціонування.
«Вітаю на курсі лекцій», — почав Андрій після короткої паузи, оцінюючи молодих інженерів. — «Мене звуть Андрій. Я маю науковий ступінь Харківського авіаційного університету. Я працюю у сфері навігаційних систем достатньо довго, щоб побачити, наскільки глибоко ця технологія впливає на безпеку, точність і геополітику».
Чому незалежна навігація критично важлива?
Андрій обернувся до дошки й накреслив супутникове сузір’я.
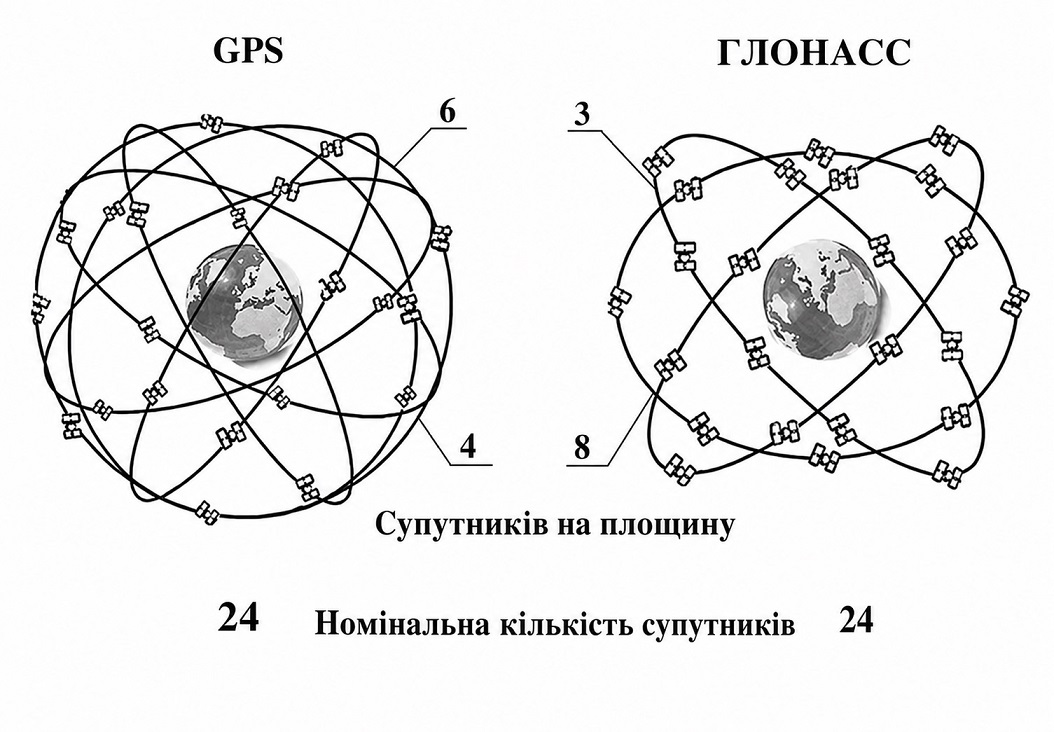
«Багато з вас вважають GPS остаточним і надійним рішенням, — сказав він. — Але насправді це геополітичний інструмент».
Він обернувся до аудиторії та продовжив:
«Коли ми готували випробування ракети-носія на космодромі Плесецьк, сталося щось несподіване. Графік запуску був визначений, усі підготовчі роботи завершені. Все йшло гладко — аж доки сигнал GPS не зник над зоною випробувань незадовго до запланованого запуску».
Андрій зробив паузу, щоб дати студентам подумати.
«Що, на вашу думку, сталося?»
Хтось обережно відповів: «Несправність обладнання?»
Андрій похитав головою.
«Запуск був за кілька хвилин, коли сигнал GPS над полігоном раптово зник. У нас не було іншого виходу, окрім як зупинити відлік і чекати дві напружені години. Як інженер, який того дня фіксував кожне вимірювання, пізніше я переглянув журнали. Картина була однозначною: хтось цілеспрямовано обмежив покриття GPS саме над нашою локацією в найкритичніший момент».
«Той день назавжди залишив відбиток на мені як на інженері. Це був потужний, реальний урок — наскільки б ідеально ви не готувалися на землі, ви все одно можете опинитися в повній залежності від навігаційного неба, яке контролюють сили, недосяжні для вас. Це був один із тих моментів, що формує ставлення до суверенітету у високоточних системах на все життя».
Небезпека режиму Selective Availability
«А тепер уявіть таке втручання не під час випробування, а в будь-якій реальній системі, що залежить від безперервного точного позиціонування, — продовжив Андрій. — Якщо активовано режим Selective Availability, наслідки можуть бути серйозними».
«Що тоді станеться?» — запитав один зі студентів.
«Точність позиціонування суттєво знизиться — з кількох метрів до 80–100 метрів або навіть гірше», — відповів Андрій. — «Це неприйнятно для застосувань, що вимагають точності на рівні метра або кращої, як-от цивільна авіація, морська навігація, геодезія чи точне землеробство».
Чому Україні потрібна власна система
Андрій ступив крок до дошки й написав великими літерами: СКНОУ = навігаційний суверенітет

«Саме тому Україні потрібно було побудувати власну навігаційну інфраструктуру. Ми не могли дозволити собі покладатися лише на GPS чи GLONASS».
Один зі студентів підняв руку: «А чому Україна була настільки залежною від GPS? Чи не могли ми використовувати GLONASS?»
Андрій зітхнув: «Тому що у 1990-х Україна втратила практично всі стратегічні аерокосмічні можливості. Політичне керівництво відмовилося від ракет великої дальності, стратегічних бомбардувальників та інших ключових активів в обмін на міжнародні гарантії безпеки».
Навігація та воєнні конфлікти
Андрій перемкнув слайд і продовжив:
«Систему СКНОУ створювали не лише для контролю навігації всередині України — вона також була призначена для того, щоб ми могли самостійно перевіряти, наскільки точними насправді є великі глобальні системи. Ще на початку 2003 року я детально вивчав показники NAVSTAR».
Андрій ненадовго замовк, його обличчя стало серйознішим.
«Під час служби в авіації з 1984 по 1986 рік я особисто супроводжував понад 500 експлуатаційних польотів літаків МіГ. Щоб дати уявлення про обсяг — це приблизно те саме навантаження, яке окрема ескадрилья ВМС США могла б нести під час масштабної операції. Це не була підручникова робота. Це була реальна інженерна робота під тиском, де кожна перевірка, кожне рішення й кожна помилка могли мати серйозні наслідки. Цей досвід і донині визначає те, як я мислю про навігаційні системи».
Один зі студентів запитав: «Що ви виявили?»
«За даними наших станцій СКНОУ на початку 2003 року, точність позиціонування була незвично високою. Замість звичних 6–10 метрів, ми фіксували похибки менше 2 метрів. Для мене як для інженера такий рівень точності був чітким технічним сигналом, що готується щось масштабне — щось, що вимагатиме навігаційної точності найвищого рівня».
Андрій додав: «На основі цих вимірювань я дійшов висновку, що готується масштабна операція, яка вимагає високоякісної навігації».
Студенти переглянулися.
Що таке СКНОУ?
Андрій перейшов до наступного слайду, на якому була зображена схема архітектури СКНОУ.
«СКНОУ — це система, призначена для підтримки точності навігації на території України. Вона побудована на принципах європейської системи EGNOS і працює спільно із сигналами GPS та GLONASS».
Він підійшов до екрана й вказав на два ключові компоненти:
- РПКНП – регіональний пункт контролю навігаційного поля
- СКК – станція контролю та корекції
Характеристики системи
Андрій вивів на екран таблицю з узагальненими рівнями точності для різних режимів обслуговування СКНОУ (де DCI позначає диференціальну корекцію та контроль цілісності):
| Сервіси СКНОУ | Широкозонна DCI (код) | Зональна DCI (код) | Локальна DCI (код) | Локальна RTK (фаза) DCI | Мережева RTK (фаза) DCI |
|---|---|---|---|---|---|
| Точність, 2σ (RMS) | 1 м (горизонталь) 2 м (вертикаль) (у межах кутів мережі) |
<1 м (у радіусі 150 км) |
0,2–1 м (30–150 км від СКК) |
0,02–0,2 м (у межах 30 км від СКК) |
0,02–0,04 м (рівномірно в межах RTK-осередку) |
«Важливо розуміти, — наголосив Андрій, — що кожен режим забезпечує різний рівень точності. Широкозонна DCI підходить для таких застосувань, як авіація та морська навігація, тоді як сервіси RTK використовуються в геодезії та точних вимірюваннях».
Тестування українського сегмента EGNOS
Він знову перемкнув слайди.
«Ще у 2000-х роках ми успішно протестували український сегмент EGNOS. Це підтвердило повну сумісність СКНОУ з європейською навігаційною інфраструктурою».
На екрані з’явилася карта з позначеними контрольними точками.
«Ми розгорнули станції моніторингу в Харкові, Сімферополі та Луганську. Ці пункти аналізували супутникові сигнали та передавали дані до Центру контролю навігаційного поля (ЦКНП)».
Умовні позначення
Андрій написав на дошці, щоб усі могли занотувати:
Етапи розробки
Ключові навігаційні терміни
Навігація та точність: щоденник наукового стажування
Станція контролю та корекції (СКК)
Андрій провів студентів до захищеної лабораторії, де розміщувалася одна з діючих станцій контролю та корекції (СКК). Всередині стійки серверів гуділи від активності — супутникові дані захоплювалися, аналізувалися й коригувалися в реальному часі.
Андрій використовував двомовний метод навчання, щоб пояснити архітектуру станції, постійно перемикаючись між схемою та фізичним обладнанням. Він розглядав схему як «теорію», а діюче обладнання — як «практику». Такий паралельний підхід, подібний до читання двомовного тексту, допомагає подолати розрив між поняттям і реальністю, забезпечуючи глибше й практичніше розуміння того, як система насправді працює.
«Це серце СКНОУ», — сказав Андрій, вказуючи на стійки точного обладнання. «Станції контролю та корекції забезпечують високоточну навігацію, приймаючи, аналізуючи та коригуючи сигнали супутників GPS і GLONASS».
Він продовжив, описуючи структуру системи:
- Приймачі на даху – захоплюють сигнали GNSS від видимих супутників.
- Обчислювальний центр – обробляє вихідні дані та обчислює диференціальні корекції.
- Передавачі – транслюють дані корекції кінцевим користувачам через захищені канали.
Архітектура станції контролю та корекції
СКК — один із найважливіших вузлів системи. Її архітектура побудована на модульних принципах і включає:
- Приймачі супутникових сигналів високої чутливості
- Потужний обчислювальний кластер для аналізу даних і контролю цілісності
- Точні стандарти частоти
- Модулі маршрутизації та зв’язку для зовнішньої передачі даних
У сукупності ці компоненти забезпечують, що СКК ефективно усуває спотворення, спричинені іоносферними та тропосферними перешкодами, тим самим підвищуючи точність позиціонування як у горизонтальній, так і у вертикальній площині по всій системі.
Андрій зупинився біля схеми й сказав: «СКК не виникла з нічого. Її архітектура розвинулася з попередніх систем, таких як «Колекція», «Єдиний центр управління (ЄЦУ)» та «Бриз»».
Концентратор вимірювальної інформації
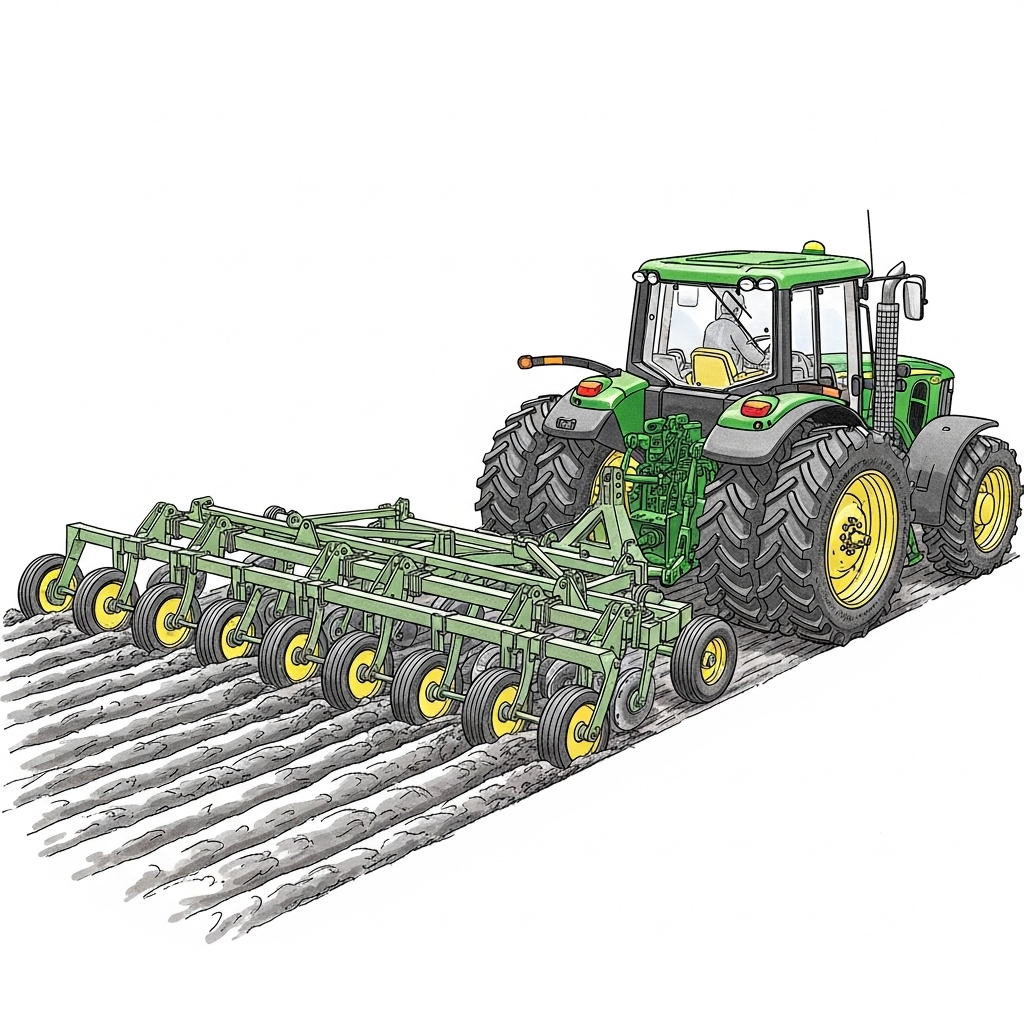
Типовий «концентратор інформації 1990-х»
Використовувався як найближча аналогія при побудові СКК (станції контролю та корекції).
На зображенні — трактор John Deere з багатосекційним плугом, що образно й точно відображає архітектуру концентратора:
🚜 Трактор = хост-ПК (Pentium 4)
Потужний керуючий вузол, що виконує обчислення та управління системою. Містить операційну систему та виконує основні завдання обробки.
🔗 Причіп = 8-портовий мультиплексор
Агрегує потоки даних від процесора узгодження до каналів. Слугує сполучною ланкою між обчисленнями та лініями зв’язку.
🔧 Плуг = процесор узгодження (ПС)
Розподіляє потік завдань від ПК на кілька незалежних каналів. Синхронізує кожну лінію зв’язку та керує паралельними операціями.
📡 Борозни = канали зв’язку
8 або більше одночасних ліній: послідовні порти, радіоканали, мережеві інтерфейси. Усі працюють незалежно та паралельно.
🧑🌾 Тракторист = рівень прикладного програмного забезпечення
Визначає маршрут, контролює напрямок, швидкість, час та точність руху. Реалізує навігаційні алгоритми високого рівня.
📌 Висновок: архітектуру «концентратора інформації» було прийнято й удосконалено за рахунок розвиненого рівня прикладного програмного забезпечення, вирішуючи навігаційні завдання, описані в лекціях старшого наукового співробітника Андрія, для створення СКК — станції контролю та корекції, що працює в реальному часі.
У цих попередниках було реалізовано й випробувано в реальних умовах роботи концепцію концентратора вимірювальної інформації. Платформи на базі UNIX слугували основою для багатозадачності, ізоляції збоїв, обробки в реальному часі та пріоритетного перемикання повідомлень.
Система «Бриз», зокрема, запровадила використання динамічної карти стану — інструменту візуалізації, що показував стан кожного каналу зв’язку. Ця карта дозволяла оператору миттєво приймати рішення, формувати небесну карту GNSS та проводити аналітику високого рівня — все в реальному часі.
Управління процесами UNIX: як добре організована вечірка біля басейну

Розширена метафора операційної системи UNIX:
🏊♂️ Надувні кільця = окремі процеси, кожен зі своїм PID (номером учасника). Можуть мати різний розмір (обсяг пам’яті) і колір (пріоритет), але всі використовують спільні ресурси басейну.
💻 Робоча станція в центрі = ядро системи, яке стежить за всіма процесами в реальному часі, керує розподілом ресурсів і приймає критичні рішення щодо планування.
🌊 Потоки води = міжпроцесна взаємодія (IPC): stdin надходить зверху, stdout виходить через канали (pipes), stderr може бути перенаправлений в окремі канали.
🏊♀️ Надувний матрац = інтерфейс командного рядка (shell), з якого дочірні процеси «занурюються» у воду під час виконання команд, контролюючи своє виконання.
🏀 М’яч = спільна пам’ять або файлові дескриптори, якими процеси можуть обмінюватися чи використовувати спільно.
🪜 Драбина = системні виклики — єдиний «законний» спосіб для процесів взаємодіяти з ядром і запитувати системні ресурси.
⭕ Діаметр басейну = обсяг доступної пам’яті (RAM) — фіксоване системне обмеження, що визначає, скільки процесів можуть комфортно «плавати» одночасно.
💦 Рівень води = поточне навантаження системи — коли басейн переповнюється, частину «пловців» тимчасово переміщують у сусідню водяну бочку (розділ підкачки на диску).
🌡️ Температура води = навантаження та температура процесора — чим інтенсивніше працюють процеси, тим «гарячішою» стає система, що вимагає охолодження чи обмеження частоти.
🧪 Хлорування води = система безпеки та прав доступу — підтримує системну «чистоту», запобігаючи потраплянню шкідливих процесів та контролюючи доступ до ресурсів.
🏊♂️ Рятувальник = система обробки помилок і винятків — стежить за «тонучими» процесами, перехоплює критичні ситуації та запобігає повному збою системи.
🔄 Циркуляція води = планувальник завдань, що забезпечує справедливий розподіл часу процесора між усіма процесами.
У СКНОУ ми не просто плавали в UNIX — ми перетворили його на повністю керований аквапарк для систем реального часу.
Як і в добре організованому басейні, в UNIX кожен елемент має своє місце і функцію, а вся система працює злагоджено завдяки чітким правилам і надійному управлінню. Ця метафора перетворює абстрактні поняття операційної системи на інтуїтивно зрозумілу фізичну сцену — чудовий приклад пояснення складного через просте.
«Завтра, — підсумував Андрій, — ми розглянемо, як СКК взаємодіє з регіональними пунктами контролю навігаційного поля (РПКНП) та як ця взаємодія формує мережевий каркас СКНОУ».
Підсумок
«На цьому сьогоднішня лекція завершена, — сказав Андрій. — Для самостійного вивчення, будь ласка, перегляньте наступні матеріали. Сподіваюся, ви зрозуміли, що навігація — це не просто набір формул, а питання навігаційного суверенітету».
«Завтра ми перейдемо до теми вхідних даних — реальних наборів даних, які обробляє система. Готуйтеся — стане значно складніше з технічної точки зору».
Додаткові матеріали для самостійного вивчення
Коли студенти виходили, Андрій гукнув: «Знайдіть час переглянути додаток із метою та характеристиками — це допоможе нам усім тримати курс у нашій подорожі супутниковою навігацією».
Таблиці лекції:
📎 Відкрити додаток – День 1
Домашнє завдання
Примітка (огляд на 2004 рік):
Наступного року Андрій (технічний архітектор, Україна) відіграватиме ключову роль у розвитку GNSS-експериментів та інфраструктури.
Його внесок включає:
- Розробку та документування всіх можливих методів трансляції GNSS-диференціальних корекцій у межах структури EGNOS/ESTB.
- Створення та обслуговування каналу супутникового радіозв’язку між Харковом і Норвегією для доставки корекцій у реальному часі.
- Аналіз ефектів багатопроменевості при прийомі сигналів GNSS за допомогою програмного забезпечення PEGAS у комплексі СКК.
- Технічне керівництво координацією національної інфраструктури для GNSS-експериментів.
-
🔗
EGNOS System Test Bed – участь України (UNOOSA, ICG 2015)
(Документ, що підтверджує роль Харкова в експерименті EGNOS/ESTB 2004–2005 рр.)
У 2004 році харківська станція брала участь у попередніх випробуваннях для інтеграції України до системи EGNOS (див. EGNOS у Вікіпедії) . У рамках цієї роботи створення прямого каналу передачі даних між Харковом і центром обробки в Норвегії вимагало подолання низки технічних і регуляторних труднощів — однією з найважливіших стало отримання дозволу на використання виділеного каналу супутникового зв’язку.
На той час це означало взаємодію з Українським державним центром радіочастот (нині — Управління радіочастотного ресурсу), що передбачало підготовку детального плану з понад 20 технічних і процедурних кроків. Відповідальність лягла на Андрія, який повністю взяв на себе цей процес — від формалізації вимог до управління всіма бюрократичними процедурами.
Мета була чіткою: створити надійний, належним чином авторизований канал супутникового обміну даними між двома країнами. Це була далеко не приємна робота, але без неї сигнал ніколи не пройшов би.